Turbocharging Rust Code Verification
Kani is a bit-precise model checker that can verify properties about your Rust code. To learn more about Kani, check out the Kani tutorial and our previous blog posts.
Over the past 9 months, we have optimized Kani at different levels to either improve general performance or solve some specific performance problems encountered on user verification harnesses.
In this post, we’ll discuss three optimizations enabled through three different components of Kani. In short:
- By allowing the selection of a specific SAT solver (globally or per harness) we can obtain consistent speedups of 2-8X and up to 200X on specific harnesses, and an 85% reduction in total runtime on a crate like s2n-quic-core;
- By adding a new GOTO program serializer that exports files in CBMC’s own binary format, we obtain a consistent 4X speedup on the GOTO code generation + export step;
- By improving constant propagation in CBMC for union types, Kani can now solve in a few seconds verification harnesses that used to explode in time and memory.
Compared to the last version of 2022, the current version of Kani (August 2023) is swifter and solves more problems in less time.
But before diving into the details of each new feature and optimization, we’ll start with a high-level overview of Kani’s architecture.
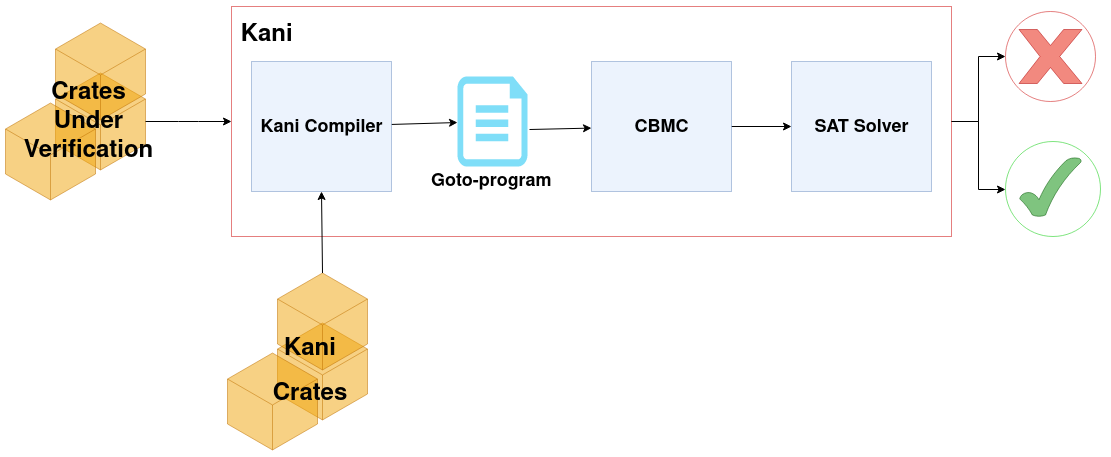
Kani Architecture Overview
First, let’s briefly introduce you to Kani’s high level architecture to understand where modifications were performed.
Kani can be invoked either directly on a Rust file using kani my_file.rs or on a whole package or crate via cargo kani (see usage here). In both cases, the verification process is very similar and Kani will continue to run until it finishes checking all harnesses found in the code, and it will report whether each harness was successfully verified or failed.
Internally, this verification process is a bit more complicated, and can be split into three main stages:
- Compilation: The Rust crate under verification and its dependencies are compiled into a program in a format that’s more suitable to verification.
- Symbolic execution: This program is then symbolically executed in order to generate a single logic formula that represents all possible execution paths and the properties to be checked.
- Satisfiability solving: This logic formula is then solved by employing a SAT or SMT solver that either finds a combination of concrete values that can satisfy the formula (a counterexample to a property exists), or prove that no assignment can satisfy the formula (all properties hold).
In fact, Kani employs a collection of tools to perform the different stages of the verification.
Kani’s main process is called kani-driver, and its main purpose is to orchestrate the execution and communication of these other tools:
- The compilation stage is done mostly1 by
kani-compiler, which is an extension of the Rust compiler that we have developed.kani-compilerwill generate agoto-programby combining all the code reachable from a harness. - For the symbolic execution stage, Kani invokes CBMC.
- The satisfiability checking stage is performed by CBMC itself, by invoking a satisfiability (SAT) solver such as MiniSat.
Finally, Kani ships with a crate (named kani) that provides a set of APIs that defines attributes, functions, traits and implementations that allow users to create and customize their harnesses. This crate is automatically added as a dependency to every other crate Kani compiles.
Note that the verification problem is computationally hard. Thus, some optimizations can have a positive effect only on a subset of harnesses, while other optimizations can bring benefits overall. Kani was designed to provide a good out-of-the box experience, but also to allow experimentation and further customization to achieve an optimal performance for each harness.
Supporting Multiple SAT Solvers
SAT solving is typically the most time-consuming part of a Kani run. There is a large number of SAT solvers available, whose performance can vary widely depending on the specific type of formula, and it can be very helpful to be able to try different SAT solvers on the same problem to determine which one performs best.
By default, CBMC uses the MiniSat SAT solver.
While CBMC can be configured to use a different SAT solver at build time, having to rebuild it to switch SAT solvers is inconvenient.
Thus, we introduced an enhancement to CBMC’s build system that allows CBMC to be built with multiple SAT solvers, so that the user can select one of them at runtime via an option (--sat-solver)2.
With this enhancement in CBMC, and to ease the selection of the SAT solver for Kani users, we’ve introduced a Kani attribute, kani::solver, that can be used to specify the SAT solver to use for each harness.
We’ve also introduced a global command-line switch, --solver <SOLVER>, that overrides the harness kani::solver attribute.
For instance, one can configure a Kani harness to use CaDiCaL as follows:
#[kani::proof]
#[kani::solver(cadical)] // <--- Use CaDiCaL for this harness
fn my_harness() { ... }
Changing the solver can result in orders of magnitude performance difference. Thus, we encourage users to try different solvers to find the one that performs the best on their harness. At the time of writing, the following three solvers are supported out of the box by Kani: minisat (the default solver Minisat), cadical (Cadical), and kissat (Kissat). Kani also allows using other SAT solvers available as standalone binaries in your system PATH. This can be done using:
#[kani::solver(bin="<SAT_SOLVER_BINARY>")]
An example of a SAT solver that we’ve found effective for certain classes of programs (e.g. ones involving cryptographic operations) is CryptoMiniSat. After installing CryptoMiniSat and adding the binary to your path, you can configure a Kani harness to use it via:
#[kani::solver(bin="cryptominisat5")]
The graphs below show a comparison of the runtimes in seconds obtained using the global --solver switch with MiniSat, CaDiCaL and Kissat on the Kani harnesses in the s2n-quic repository, with a timeout of 30 minutes.
The comparison was done using Kani 0.33.0 and CBMC 5.88.1.
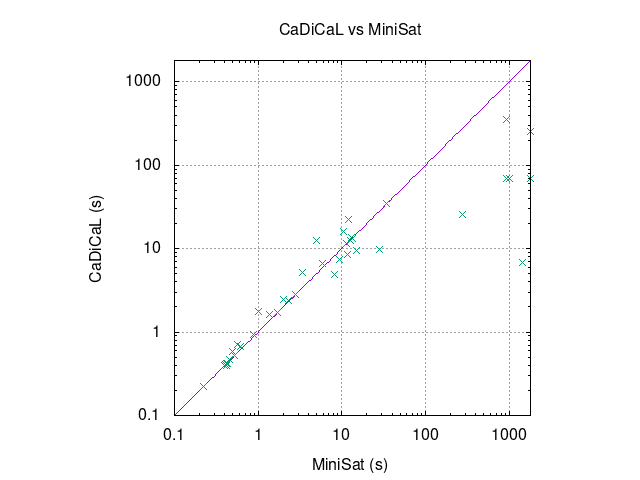
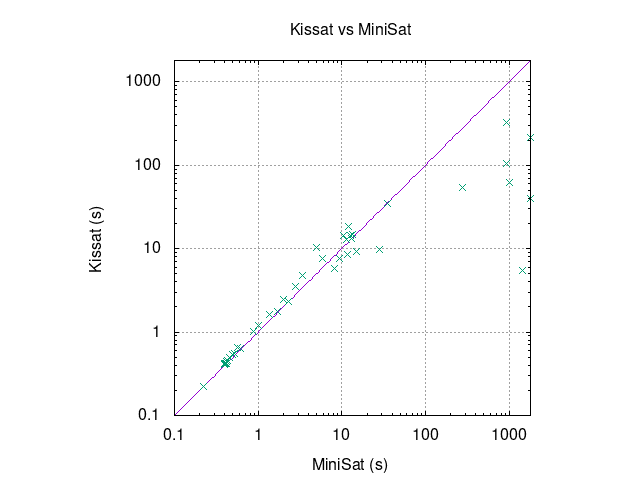
We see that Kissat and CaDiCaL can solve verification harnesses that would timeout with MiniSat, and provide significant speedups on some other verification harnesses.
For example, for random::tests::gen_range_biased_test, verification time goes down from 1460 seconds with MiniSat to 6.8 and 5.5 seconds with CaDiCaL and Kissat, respectively, thereby providing speedups of more than 200X.
Similarly, for sync::spsc::tests::alloc_test, verification time goes down from 1004 seconds with MiniSat to 63 seconds with Kissat (a 16X speedup), and 70 seconds with CaDiCaL (a 14X speedup).
We also see that MiniSat remains the fastest solver for harnesses that already run in a matter of seconds. Of the harnesses that run for more than 10 seconds, Kissat is the fastest on 47% of them, CaDiCaL is the fastest on 24%, and MiniSat on the rest.
By picking the best solver for each harness using the kani::solver attribute, we can can bring the total cumulative runtime from 2 hours and 20 minutes down to 15 minutes (counting timeouts as 1800s), while solving two more harnesses. Great savings if your harnesses are run in CI!
Adding Direct Export of GOTO Binaries
kani-compiler translates a Rust program into a GOTO program and exports it as a symbol table for CBMC to analyse. A symbol table stores the definitions and source locations of all symbols manipulated by the program (type symbols and their definitions, static symbols and their initial value, function symbols and their bodies, etc.).
The symbol table contents hence mostly consists of serialized abstract syntax trees.
Originally, Kani serialized symbol tables to JSON and then used the CBMC utility symtab2gb to translate the JSON symbol table into a GOTO binary, which is the format that CBMC actually expects as input.
The JSON to GOTO binary conversion was one of the most time consuming steps in the compilation stage.
We implemented direct GOTO binary serialisation in Kani, which allows us to skip the costly invocation of symtab2gb.
Kani can now perform the MIR-to-GOTO code generation and GOTO binary export 4X faster than before.
The table below reports total time and memory consumption when running with kani-0.33.0 for code generation only, for three crates of the s2n-quic project, with JSON symbol table export versus GOTO binary export.
| Crate | User time (JSON) | User time (GOTO bin.) | Peak Mem. (JSON) | Peak Mem. (GOTO bin.) |
|---|---|---|---|---|
s2n-quic-core |
198s | 111s | 669MB | 815MB |
s2n-quic-platform |
99s | 91s | 449MB | 450MB |
s2n-quic-xdp |
92s | 95s | 450MB | 450MB |
For s2n-quic-core, which contains 37 verification harnesses, we observe a reduction of 45% of User time from 199s down to 111s, and a 20% memory consumption increase from ~670Mb to ~815Mb.
For the two other crates which contain respectively 3 and 1 harnesses, the User time is dominated by Rust to MIR compilation and the total gains with GOTO binary export are lower
at roughly 10% and even degrade to negative 4%, albeit for virtually no memory consumption increase.
Looking in more detail at GOTO code generation and GOTO binary export time for individual harnesses, excluding the Rust-to-MIR compilation time, we see that GOTO binary export is ~9x faster than JSON export, and that the GOTO code generation and export step is now ~4x faster (see the Detailed table below). The savings seem small but accumulate to eventually make a noticeable difference.
GOTO binary export is now the default export mode, because it is faster when there are multiple verification harnesses in a crate, which is more often the case in practice.
The memory consumption can be sometimes higher than with JSON export, but it can also sometimes be lower depending on how much opportunity for sharing of identical subtrees the crate offers (on large crates like std or proc_macro we’ve observed up to 2x reduction in memory usage). Should you ever need it, JSON export can still be activated with the command line switch --write-json-symbtab.
Detailed GOTO codegen and export times table
| verification harness | GOTO codegen time (s) | JSON export (s) | GOTO-binary export (s) | export speedup | codegen + export speedup |
|---|---|---|---|---|---|
ct::tests::ct_ge... |
0.32 | 1.48 | 0.17 | 8.70 | 3.67 |
ct::tests::ct_gt... |
0.26 | 1.32 | 0.14 | 9.42 | 3.95 |
ct::tests::ct_le... |
0.26 | 1.32 | 0.14 | 9.42 | 3.95 |
ct::tests::ct_lt... |
0.26 | 1.33 | 0.14 | 9.50 | 3.97 |
ct::tests::rem... |
0.26 | 1.32 | 0.16 | 8.25 | 3.76 |
ct::tests::sub... |
0.26 | 1.33 | 0.14 | 9.50 | 3.97 |
ct::tests::div... |
0.26 | 1.33 | 0.14 | 9.50 | 3.97 |
ct::tests::add... |
0.26 | 1.33 | 0.14 | 9.50 | 3.97 |
ct::tests::mul... |
0.26 | 1.32 | 0.14 | 9.42 | 3.95 |
frame::crypto::tests::try_fit_test... |
0.66 | 3.31 | 0.39 | 8.48 | 3.78 |
frame::stream::tests::try_fit_test... |
0.67 | 3.44 | 0.38 | 9.05 | 3.91 |
inet::checksum::tests::differential... |
0.51 | 2.46 | 0.26 | 9.46 | 3.85 |
inet::ipv4::tests::header_getter_setter_test... |
0.44 | 2.11 | 0.22 | 9.59 | 3.86 |
inet::ipv4::tests::scope_test... |
1.01 | 5.18 | 0.56 | 9.25 | 3.94 |
inet::ipv6::tests::header_getter_setter_test... |
0.44 | 2.17 | 0.23 | 9.43 | 3.89 |
inet::ipv6::tests::scope_test... |
1.08 | 5.34 | 0.59 | 9.05 | 3.84 |
interval_set::tests::interval_set_inset_range_test... |
0.83 | 4.3 | 0.45 | 9.55 | 4.00 |
packet::number::map::tests::insert_value... |
0.28 | 1.49 | 0.16 | 9.31 | 4.02 |
packet::number::sliding_window::test::insert_test... |
0.86 | 4.22 | 0.46 | 9.17 | 3.84 |
packet::number::tests::example_test... |
1.09 | 5.67 | 0.59 | 9.61 | 4.02 |
packet::number::tests::rfc_differential_test... |
0.30 | 1.62 | 0.18 | 9.40 | 4.0 |
packet::number::tests::truncate_expand_test... |
0.63 | 3.23 | 0.35 | 9.22 | 3.9 |
packet::number::tests::round_trip... |
0.22 | 1.18 | 0.13 | 9.00 | 4.00 |
random::tests::gen_range_biased_test... |
0.31 | 1.58 | 0.18 | 8.77 | 3.85 |
recovery::rtt_estimator::test::weighted_average_test... |
0.43 | 2.23 | 0.24 | 9.29 | 3.97 |
slice::tests::vectored_copy_fuzz_test... |
0.73 | 3.33 | 0.35 | 9.51 | 3.75 |
stream::iter::fuzz_target::fuzz_builder... |
0.26 | 1.35 | 0.14 | 9.64 | 4.02 |
sync::cursor::tests::oracle_test... |
0.92 | 4.41 | 0.46 | 9.58 | 3.86 |
sync::spsc::tests::alloc_test... |
0.82 | 4.15 | 0.45 | 9.22 | 3.91 |
varint::tests::checked_ops_test... |
0.95 | 4.94 | 0.55 | 8.98 | 3.92 |
varint::tests::table_differential_test... |
0.95 | 4.93 | 0.51 | 9.66 | 4.02 |
varint::tests::eight_byte_sequence_test... |
0.96 | 4.97 | 0.52 | 9.55 | 4.00 |
varint::tests::four_byte_sequence_test... |
0.95 | 4.95 | 0.52 | 9.51 | 4.01 |
varint::tests::two_byte_sequence_test... |
0.97 | 4.98 | 0.52 | 9.57 | 3.99 |
varint::tests::one_byte_sequence_test... |
0.25 | 1.32 | 0.14 | 9.42 | 4.02 |
varint::tests::round_trip_values_test... |
0.27 | 1.38 | 0.15 | 9.20 | 3.92 |
xdp::decoder::tests::decode_test... |
0.58 | 2.93 | 0.31 | 9.45 | 3.94 |
message::cmsg::tests::round_trip_test... |
0.37 | 1.59 | 0.19 | 8.36 | 3.50 |
message::cmsg::tests::iter_test... |
0.77 | 3.75 | 0.41 | 9.14 | 3.83 |
message::msg::tests::address_inverse_pair_test... |
0.85 | 4.07 | 0.43 | 9.46 | 3.84 |
task::completion_to_tx::assign::tests::assignment_test... |
0.36 | 1.48 | 0.17 | 8.70 | 3.47 |
| Total | Total | Total | Avg | Avg | |
| 22.8 | 114.66 | 12.33 | 9.29 | 3.90 |
Enabling Constant Propagation for Individual Fields of Union Types
Union types are very common in goto-programs emitted by Kani, due to the fact that Rust code typically uses enums, which are themselves modelled as tagged unions at the goto-program level.
Initially the field sensitivity transform in CBMC enabled constant propagation for individual array cells and individual struct fields, but not for union fields.
Since constant propagation helps pruning control flow branches during symbolic execution and can greatly reduce the runtime of an analysis, ensuring that constant propagation also works for union fields is important for Rust programs.
Field-sensitivity was first extended to unions in cbmc 5.71.0, but did not make it to Kani until kani v0.17.0 built on top of cbmc v5.72.0.
The feature was then refined and stabilized in several iterations and became stable with cbmc v5.85.0 in early June 2023, and released through kani v0.31.0 built on top of cbmc v5.86.0.
This new CBMC feature vastly improved performance for Rust programs manipulating Vec<T> and BTreeSet<T> data types, and allowed us to solve a number performance issues reported by our users: #705, #1226, #1657, #1673, #1676.
The following tables and plots were obtained by running the kani perf test suite with kani 0.33.0, cbmc 5.88.1 with cadical as the default SAT solver for all tests, a timeout of 900s, with and without applying the union-field sensitivity transform.
Field sensitivity allows 5 new verification harnesses to be solved under the 900s limit: btreeset/insert_any/main, btreeset/insert_multi/insert_multi, btreeset/insert_same/main, misc/display_trait/slow, misc/struct_defs/fast_harness.
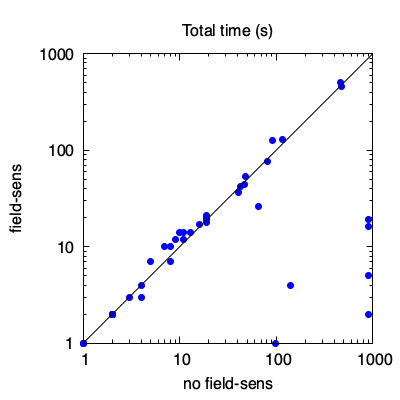
We observe a 10% to 99% reduction in runtime for roughly a third of verification harnesses (and 5 newly solved harnesses within the 900s time limit), but we also observe a 10% to 55% runtime degradation for 25% of the verification harnesses, so this feature does not bring a consistent benefit. However, the cumulative total time to run the perf suite without union field sensitivity is roughly 6500s, and it drops to 1784s with union field sensitivity activated. Disabling union field sensitivity for harnesses where it degrades performance would only bring the cumulative total time down to 1676s. So we can say getting rid of timeouts and gains on a subset of harnesses offset the losses on the rest of harnesses.
Detailed total time table
| Verification harness | no-sens | sens | best | change |
|---|---|---|---|---|
| misc/struct_defs/fast_harness | 900.00 | 0.89 | 0.89 | -99.9% |
| misc/display_trait/slow | 900.00 | 2.67 | 2.67 | -99.7% |
| misc/struct_defs/slow_harness2 | 66.72 | 0.24 | 0.24 | -99.6% |
| btreeset/insert_any/main | 900 | 5.14 | 5.14 | -99.4% |
| misc/struct_defs/slow_harness1 | 20.33 | 0.21 | 0.21 | -98.9% |
| vec/box_dyn/main | 97.24 | 1.79 | 1.79 | -98.1% |
| btreeset/insert_same/main | 900 | 16.65 | 16.65 | -98.1% |
| btreeset/insert_multi/insert_multi | 900 | 19.87 | 19.87 | -97.7% |
| vec/string/main | 142.38 | 4.02 | 4.02 | -97.1% |
| s2n-quic/quic/s2n-quic-core/inet::checksum::tests::differential | 66.29 | 26.03 | 26.03 | -60.7% |
| s2n-quic/quic/s2n-quic-core/interval_set::tests::interval_set_inset_range_test | 4.88 | 3.87 | 3.87 | -20.6% |
| s2n-quic/quic/s2n-quic-core/ct::tests::rem | 1.33 | 1.11 | 1.11 | -16.4% |
| s2n-quic/quic/s2n-quic-core/ct::tests::div | 1.15 | 0.98 | 0.98 | -14.4% |
| misc/display_trait/fast | 2.43 | 2.13 | 2.13 | -12.3% |
| s2n-quic/quic/s2n-quic-core/frame::crypto::tests::try_fit_test | 8.9 | 7.9 | 7.9 | -11.2% |
| s2n-quic/quic/s2n-quic-core/frame::stream::tests::try_fit_test | 41.29 | 36.83 | 36.83 | -10.8% |
| s2n-quic/quic/s2n-quic-core/packet::number::tests::truncate_expand_test | 2.75 | 2.59 | 2.59 | -5.9% |
| s2n-quic/quic/s2n-quic-core/varint::tests::table_differential_test | 1.15 | 1.08 | 1.08 | -5.8% |
| s2n-quic/quic/s2n-quic-core/varint::tests::round_trip_values_test | 19.27 | 18.15 | 18.15 | -5.7% |
| s2n-quic/tools/xdp/s2n-quic-xdp/task::completion_to_tx::assign::tests::assignment_test | 47.06 | 44.53 | 44.53 | -5.3% |
| s2n-quic/quic/s2n-quic-core/slice::tests::vectored_copy_fuzz_test | 81.54 | 77.71 | 77.71 | -4.7% |
| s2n-quic/quic/s2n-quic-core/packet::number::tests::example_test | 0.38 | 0.36 | 0.36 | -4.4% |
| s2n-quic/quic/s2n-quic-core/sync::cursor::tests::oracle_test | 474.06 | 459.59 | 459.59 | -3.0% |
| format/fmt_i8 | 43.83 | 42.94 | 42.94 | -2.0% |
| misc/array_fold/array_sum_fold_proof | 0.93 | 0.92 | 0.92 | -1.4% |
| s2n-quic/quic/s2n-quic-core/packet::number::tests::rfc_differential_test | 3.89 | 3.85 | 3.85 | -1.1% |
| s2n-quic/quic/s2n-quic-platform/message::cmsg::tests::iter_test | 19.5 | 19.33 | 19.33 | -0.8% |
| s2n-quic/quic/s2n-quic-core/ct::tests::mul | 0.75 | 0.75 | 0.75 | -0.2% |
| s2n-quic/quic/s2n-quic-core/packet::number::map::tests::insert_value | 2.62 | 2.65 | 2.62 | 1.1% |
| vec/vec/main | 2.18 | 2.21 | 2.18 | 1.7% |
| s2n-quic/quic/s2n-quic-core/ct::tests::add | 0.68 | 0.69 | 0.68 | 2.4% |
| s2n-quic/quic/s2n-quic-core/ct::tests::ct_gt | 0.63 | 0.65 | 0.63 | 2.7% |
| s2n-quic/quic/s2n-quic-core/inet::ipv4::tests::scope_test | 4.25 | 4.38 | 4.25 | 3.2% |
| s2n-quic/quic/s2n-quic-core/ct::tests::sub | 0.67 | 0.69 | 0.67 | 3.4% |
| s2n-quic/quic/s2n-quic-core/ct::tests::ct_lt | 0.63 | 0.65 | 0.63 | 3.9% |
| s2n-quic/quic/s2n-quic-core/packet::number::tests::round_trip | 19.38 | 20.2 | 19.38 | 4.2% |
| s2n-quic/quic/s2n-quic-core/ct::tests::ct_le | 0.62 | 0.65 | 0.62 | 4.2% |
| s2n-quic/quic/s2n-quic-core/ct::tests::ct_ge | 0.62 | 0.65 | 0.62 | 4.9% |
| s2n-quic/quic/s2n-quic-core/varint::tests::eight_byte_sequence_test | 13.66 | 14.37 | 13.66 | 5.1% |
| s2n-quic/quic/s2n-quic-core/stream::iter::fuzz_target::fuzz_builder | 0.82 | 0.87 | 0.82 | 6.3% |
| s2n-quic/quic/s2n-quic-core/packet::number::sliding_window::test::insert_test | 1.46 | 1.55 | 1.46 | 6.5% |
| s2n-quic/quic/s2n-quic-core/inet::ipv4::tests::header_getter_setter_test | 19.59 | 21.04 | 19.59 | 7.3% |
| s2n-quic/quic/s2n-quic-platform/message::cmsg::tests::round_trip_test | 463.27 | 497.46 | 463.27 | 7.3% |
| misc/array_fold/array_sum_for_proof | 0.86 | 0.95 | 0.86 | 9.3% |
| s2n-quic/quic/s2n-quic-core/inet::ipv6::tests::scope_test | 16.4 | 17.95 | 16.4 | 9.4% |
| s2n-quic/quic/s2n-quic-core/inet::ipv6::tests::header_getter_setter_test | 48.89 | 53.53 | 48.89 | 9.4% |
| s2n-quic/quic/s2n-quic-core/recovery::rtt_estimator::test::weighted_average_test | 117.62 | 129.32 | 117.62 | 9.9% |
| s2n-quic/quic/s2n-quic-core/varint::tests::checked_ops_test | 2.49 | 2.76 | 2.49 | 11.0% |
| s2n-quic/quic/s2n-quic-core/varint::tests::two_byte_sequence_test | 11.21 | 12.5 | 11.21 | 11.5% |
| s2n-quic/quic/s2n-quic-core/varint::tests::four_byte_sequence_test | 11.64 | 14.06 | 11.64 | 20.7% |
| s2n-quic/quic/s2n-quic-core/varint::tests::one_byte_sequence_test | 8.76 | 10.82 | 8.76 | 23.5% |
| format/fmt_u8 | 9.41 | 12.06 | 9.41 | 28.2% |
| s2n-quic/quic/s2n-quic-core/sync::spsc::tests::alloc_test | 92.84 | 126.45 | 92.84 | 36.2% |
| s2n-quic/quic/s2n-quic-core/random::tests::gen_range_biased_test | 10.48 | 14.76 | 10.48 | 40.8% |
| s2n-quic/quic/s2n-quic-core/xdp::decoder::tests::decode_test | 5.17 | 7.59 | 5.17 | 46.7% |
| s2n-quic/quic/s2n-quic-platform/message::msg::tests::address_inverse_pair_test | 7.09 | 10.98 | 7.09 | 54.8 |
| total | total | total | ||
| 6521.99 | 1784.57 | 1676.07 |
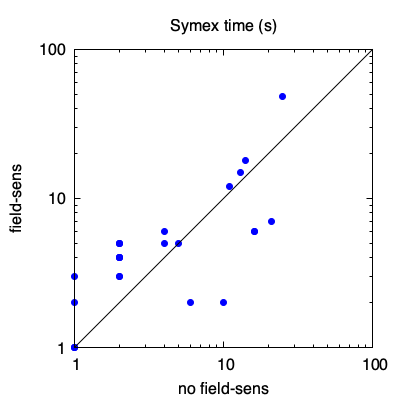
We see that symbolic execution time is sometimes improved, sometimes degraded. The degradation can possibly be explained by the fact that symex has to generate more constraints and handle more basic variables with the transform activated, and spend more time applying simplifications. But this extra work has a beneficial impact on the number of symbolic execution steps and number of VCCs generated for the SAT solver, and ultimately SAT solver runtime (as seen below).
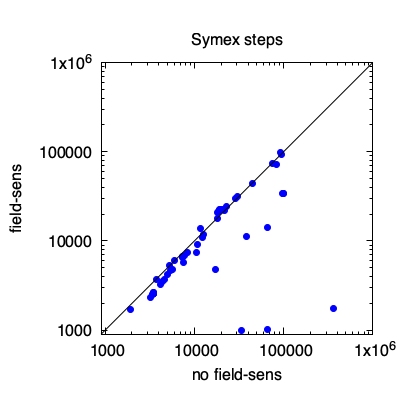
The number of basic symbolic execution steps is sometimes slightly higher but otherwise mostly lower with union field sensitivity activated.
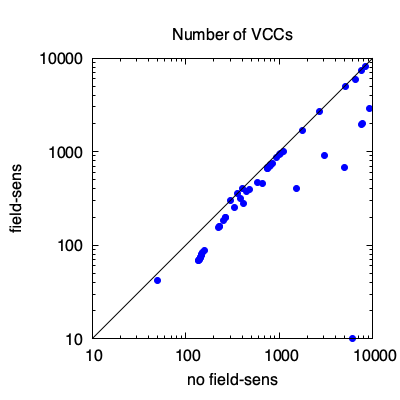
The number of verification conditions generated is sometimes slightly higher but otherwise mostly lower with union field sensitivity activated.
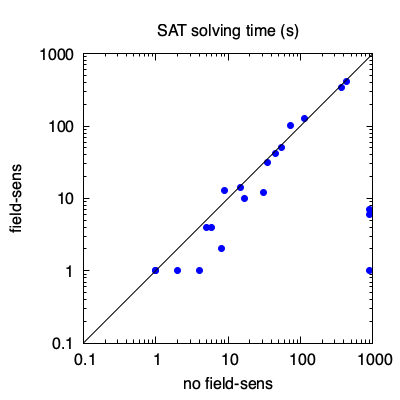
Overall, the SAT solving time is sometimes slightly degraded but otherwise mostly improved across the board with field-sensitivity.
Details on the field-sensitivity transform
CBMC’s constant propagation algorithm only propagates values for scalar variables with a basic datatype such as bool, int, … but not for aggregates. To enable propagation for individual fields of aggregates, CBMC decomposes them into their individual scalar fields, by introducing new variables in the program, and resolving all field access expressions to these new variables.
For unions, just like for structs, the transform introduces a distinct variable for each field of the union. However, contrary to structs, the different fields of a union overlap in the byte-level layout. As a result, every time a union field gets assigned with a new value, all fields of the union are actually impacted, and the impact depends on how the fields overlap in the layout. This means that the variables representing the different fields of the union have to be handled as a group and globally updated after each update to any one of them.
For instance, for a union defined as follows (using C syntax for simplicity):
union {
unsigned long a;
unsigned int b;
} u;
The byte-level layout of the fields is such that the lowest 4 bytes of u.a and all bytes of u.b overlap. As a result, updating u.a updates all bytes u.b, and updating u.b updates the lowest 4 bytes of u.a:
u uuuuuuuuuuuuuuuu
u.a aaaaaaaaaaaaaaaa
u.b bbbbbbbb
idx. 16 7 0
MSB LSB
The transform introduces a variable u_a to represent u.a, and a variable u_b to represent u.b. These two variables are not independent, and every-time one of the fields is updated in the original program, both variables are updated in the transformed program.
Applying the transform to the following program:
int main() {
union {
unsigned long a;
unsigned int b;
} u;
u.a = 0x0000000000000000;
u.b = 0x87654321;
assert(u.a == 0x0000000087654321);
assert(u.b == 0x87654321);
return 0;
}
produces the following transformed program:
int main() {
unsigned long u_a;
unsigned int u_b;
// the bytes of u_b are equal the low bytes of u_a
u_b = (unsigned int) u_a;
// u.a = 0x0000000000000000;
u_a = 0x0000000000000000;
u_b = (unsigned int) 0x0000000000000000;
// u.b = 0x87654321;
u_a = (u_a & 0xFFFFFFFF00000000) | ((unsigned long) 0x87654321);
u_b = 0x87654321;
// assert(u.a == 0x0000000087654321);
assert(u_a == 0x0000000087654321);
// assert(u.b == 0x87654321);
assert(u_b == 0x87654321);
return 0;
}
Conclusion
In conclusion, we would like to point out the multi-faceted approach to optimizing a tool such as Kani and making verification scalable in general. Some optimizations are geared towards solving unsolvable cases, whereas others are more general in nature. A reflection of the difficult problem space we are dealing with. Specific tools can achieve better performance with niche optimizations, but tools like Kani have to be optimized at various levels to achieve realistic performant verification. We hope you enjoyed the blog post and got a sense of the need for a multi-faceted approach!
Footnotes
-
To verify Cargo packages, Kani employs Cargo to correctly build all the dependencies before translating them to GOTO programs. ↩
-
Without our enhancement to CBMC, it was already possible to select a different SAT solver without rebuilding CBMC via the
--external-sat-solveroption. However, this option doesn’t use the solver in incremental mode (i.e. through its library API, keeping the solver alive between successive calls), and instead relies on writing DIMACS files to disk, which often results in decreased performance. ↩